


对于箱拣来说,捕获物体3D影像的难题可以由结构光技术解决。基于结构光技术的3D扫描仪/相机通过将一系列图案投射到被扫描的物体上而工作,并且用相机或传感器来捕获图案失真。然后三角剖分算法计算数据并输出3D点云。图像处理软件(如MVTech开发的Halcon)计算物体位置和机械臂的***佳进场路线(图1)。
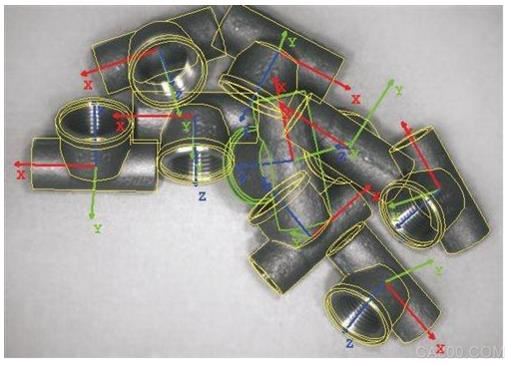
图1:使用Halcon将管接头与其各自的3D模型进行匹配的示例(来源:MVTech开发的Halcon)
DLP技术通过安装在半导体芯片顶部的微镜矩阵(也称为数字微镜器件,DMD)提供高速图案投射能力,如图2所示。DMD上的每个像素表示投影图像中的一个像素,并允许像素***图像投影。微镜在~3us时可以转换,以通过投影透镜将入射光反射到物体上或光块上。前者可以在投影场景中获得明亮像素,而后者可以创建暗像素。DLP技术也具备独特的优势,能够使用各种光源(如灯、LED和激光)在宽波长范围(420 nm–2500 nm)内投射图案。
用于箱拣的由DLP技术驱动的结构光具备多种优势:
l抗环境光照能力强。工厂的光照条件,如低曝光和不同照明区域之间的高对比度,导致传感器曝光不足或会对机器视觉系统产生干扰的闪光灯,对需要机器视觉的应用(如箱拣)来说是一大挑战。由DLP技术驱动的结构光本身具有主动照明,这使得它能够抵抗这些条件。
l无活动部件。结构光系统可以立即捕获整个场景,不再需要将光束扫过物体或通过光束移动物体(如在扫描解决方案中)。结构光系统保护在宏观尺度内不使用活动部件,这使其能够免受机械磨损。
l实时3D图像采集。DLP芯片中的微镜以高速度控制,可提供高达32kHz的自定义图案投影。除此之外,DLP控制器提供触发输出和输入,可用于使相机和其他设备与投影图案序列保持同步。这些功能有助于实现允许同时扫描和挑选的实时3D图像采集。
l投影图案的高对比度和高分辨率。由于每块微镜可以将光反射到目标或吸收表面上,因而可以获得高对比度,使得能够在不受物体表面属性影响情况下进行准确的点检测。再加上使用具有2560 x 1600块镜子的高分辨率DLP芯片,可以探测到微米级的物体。
l适用于物体参数。与使用衍射光学元件的系统相比,可编程图案和各种点编码方案(如相移或格雷编码)使结构光系统更适合对象参数。
l加快开发时间。尽管机器人提供较高的重复性,但在非结构化环境中,箱拣需要***性。因为在这种环境下,每次从储存箱中取出一个物体时,所拣选的物体的位置和方向都会发生变化。成功应对这一挑战需要可靠的工艺流程——从机器视觉到计算软件,再到机器人的灵巧性和抓取器。使所有东西协同工作可能是一项耗费大量开发时间的挑战。
了解更多ABB机器人配件,ABB机器人管线包,驱动备件包
2020.07.03 本文摘自网络
- 下一篇:基于工业机器人视觉的摄像机标定系统
- 上一篇:码垛机械手的优点都有哪些
